

KI-basierte Dynamikmodelle für die modellbasierte Vorsteuerung eines Fräsroboters
Industrieroboter (IR) werden aktuell für Prozesse verwendet, die durch geringe Vorschübe und Geschwindigkeitswerte gekennzeichnet sind, wie z.B. Handhabungs-und Schweißprozesse. Aufgrund ihrer Flexibilität, geringeren Investitionskosten sowie vergleichsweise niedrigerem Energieverbrauch, werden IR als Alternative zu Werkzeugmaschinen angesehen.
- Hohe Anforderungen an Endkontur- und Oberflächengüte
- Hohe Prozesskräfte
- Geringe Steifigkeiten des Roboters
- Werkzeugabdrängung bis hin zum Werkzeugbruch
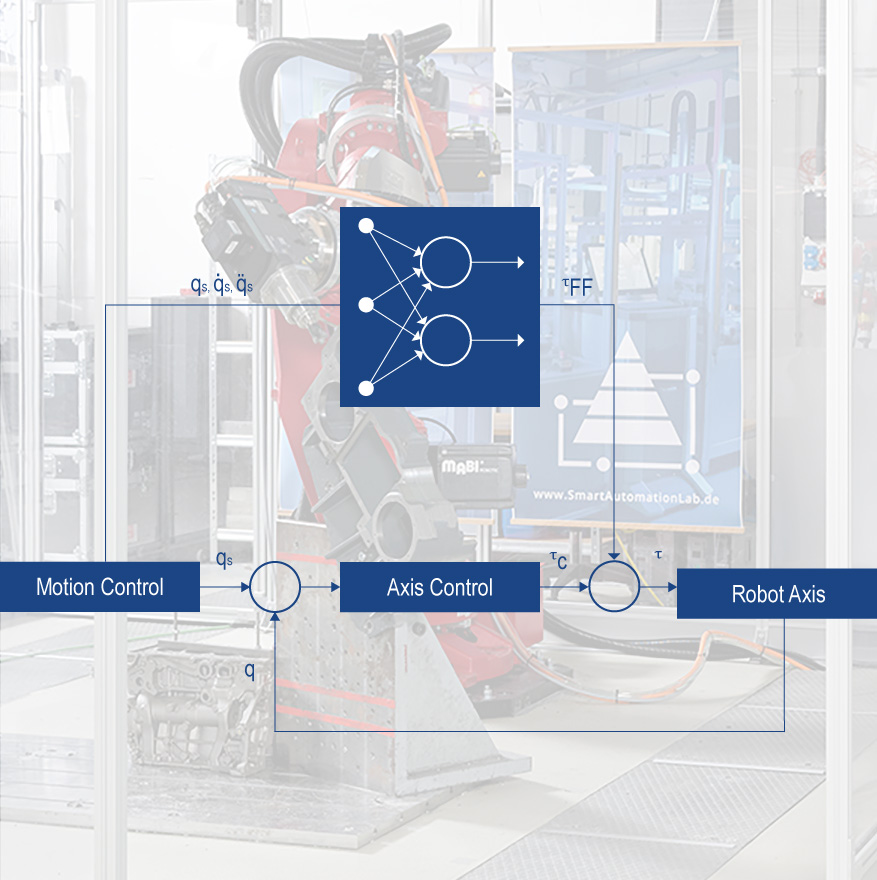
- Kompensation der Werkzeugabdrängung mittels einer modellbasierten Vorsteuerung
- Modellierung mithilfe verschiedener Neuronaler Netzarchitekturen
- MABI MAX 100 6-Achs-Knickarm-Industrieroboter
- Sinumerik 840D sl Steuerung
- HSD ES 789 Spindel
- Datenübertragung von Zeitreihen- und Eventdaten des Roboters
über MQTT-Protokoll - Datenspeicherung in SQL-basierter Datenbank (TimescaleDB)
- Datenvisualisierung in Dashboard (Grafana/ Thingsboard)
- Daten werden automatisch oder bei gesetzten Triggern in die Datenbank geschrieben
- Die Daten werden genutzt, um verschiedene Modelle zu trainieren
- Modellarchitekturen: Long Short-Term Memory Networks (LSTM), Transformer Networks, hybride Modelle
- Höhere Modellgenauigkeiten mit datenbasierten Modellen verglichen mit analytischen Modellen erzielt
- Weitere Untersuchung lassen eine verbesserte Modelladaption an
veränderten Systembedingungen erwarten sowie eine einfachere
Ergänzung von Einflussfaktoren